| __ | Luna 21 Lunokhod (B) Rover | __ |
|
|
|
Lunokhod (B)/Luna-21 | Lunokhod (A)/Luna-21 | Lunokhod (B)/Luna-21 | Lunokhod (A/B)/Luna-17 | |
|
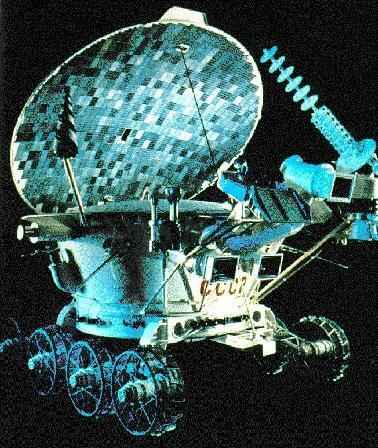
ローバー(Lunokhod 2/無人月面車)は、全長170cm、全幅160cm、全高135cm、重量840kgで、独立した8つの車輪が駆動系を受け持っている(規模こそ違うがSF小説 「2001年宇宙の旅」 のムーンバスを彷彿とさせる)。動力源は上部の蓋(自動車のボンネットのように開く)の裏側に付加されている太陽電池である。従って夜間は活動を停止する。なお、夜の極寒な環境からローバーを守るためにポロニウム210(熱源となる)が積まれている。 テレビジョンカメラは3台搭載されているが、そのうちの1台がナビゲーション用として車体の上部にマウントされていて、フレームレートの異なる高画質なイメージを地球側に電送できるようになっている。そして地球側のローバー操作チーム(5人)は、逐次電送されてくるナビゲーション用イメージを分析しながらローバーにコマンドを送信してリアルタイムに操作するのである。このようなコントロールシステムの都合上、ローバーの走行スピードは限られてくる。選択できる二種類のスピードが「超低速」であるのはこのためだ。1997年に行われたマーズパスファインダー・ミッション(Mars Pathfinder Mission/火星探査)でも無人のローバー(Sojourner/ソジャーナ)が使われたが、そのローバーの走行スピードが 「亀の歩み(それ以下)」 だったのと同様の理由である。 その他、パノラマカメラが4台、コーン(円錐)状のアンテナ、指向性の高いらせん状のアンテナ、土壌試験器、太陽エックス線の実験機器、紫外線レベル測定用の光度計、磁気計、放射計などがマウントされていた。 ルナ21号のローバーは大変な働き者だった。4カ月にもわたって月面上を動き回り、観測や実験を繰り返したのである。その走行距離は延べ37km。平坦地ばかりではない、丘や高地もあれば裂溝もあるのだ。バッテリーが消耗すると一時停止してチャージし、夜間はポロニウムを湯たんぽ代わりにして眠りにつくのが日課だった。その間、86のパノラマ画像と80,000以上のテレビジョン画像を取得して地球側に電送している。 |
![]()
![]()
![]()
End of Luna 21 Lunokhod (B) Rover
![]()