| __ | Apollo Lunar Module TOP _blank | __ |

![]()
![]()
![]()
[ Apollo Modules TOP ][ C S M ][ Command Module ][ Service Module ][ Lunar Module ]
![]()
![]()
|
アポロ計画のモジュール開発で一番てこずったのがこの LM (Lunar Module 月着陸船 / LEM=Lunar Excursion Module / レム とも表記される) である。 LM が初めて宇宙空間に到達したのは 1968年1月22日打ち上げの アポロ5号 で、無人飛行とはいえ、地球周回軌道上で下降 (Descend stage) 及び上昇 (Ascent stage) 用エンジンのテストを行っている。 → アポロ5号当時の LM モックアップ (実物大の模型) も参照。 ところが、1968年10月11日打ち上げの アポロ7号 には LM が搭載されていなかった。同号はアポロ計画初の有人飛行を達成した記念すべきミッションだったが、LM に関する限りは、サターンIB型ロケット の二段目 (S-IVB) を LM にみたてたのみで、開発に資する成果は殆どなかった。 次の アポロ8号 も同様で、LM は搭載されなかった。当初のスケジュールでは、アポロ8号で有人の LM フライト・テストを (地球周回軌道上で) 行うことになっていたが、LM の開発は大幅に遅れていたのだ。有人で LM が飛行したのは アポロ9号 (1969年3月3日) になってからである。 |
|
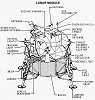
LM はオールインワンのモジュールではなく、上部 (上昇・離陸ステージ) コンポーネントと、下部 (降下・着陸ステージ) コンポーネントで構成され、それぞれが別々の機能を有している。 船体の主要部分はアルミ合金製。 上部コンポーネント (キャビン) は、操縦桿・コントローラーや各種スイッチ・計器類、LM 誘導コンピュータ (Lunar Module Guidance Computer /LGC) 及びデータ・ユニット、観測・撮影機器、宇宙服、生命維持装置 (PLSS)、宇宙食、倉庫、上昇・離陸用エンジン等で占められ、月面滞在中は飛行士の居住スペースとなる。定員は2名。 下部コンポーネントは、降下・着陸用のエンジンと脚 (4脚) からなり、脚の一つには乗降のためのハシゴが付属する。その他、アポロ15〜17号では 月面車 (Lunar Roving Vehicle /LRV) が搭載されている。これら下部コンポーネントと月面車は そのまま月面上に残され、プラーク を掲げた着陸の記念碑として、あるいは、離陸する LM の テレビジョン撮影マシン として引き続き存在・機能し続ける。 |
|
LM は、モジュールとしては月面離着陸プロパーだが、その設計思想には緊急時の救命ボートとしての機能が盛り込まれている。例えば、余裕を持たせて積まれている酸素や、機械船 (SM、Service Module) の補助になり得る充分な推力のロケット・エンジンなどである。 液体酸素タンク爆発事故を起こした アポロ13号 は、このモジュールの、この設計思想のおかげで無事帰還できた。飛行士たちは、酸素、水、電源等の供給手段を失った CSM を休眠状態に置き、LM に全てを託して生き延びたのである。 LM の開発の遅れ (開発期間の延長) は、はからずも、「信頼性、補充性」 という余禄を LM 自体に付加してくれていた。 |
![]()
![]()
|
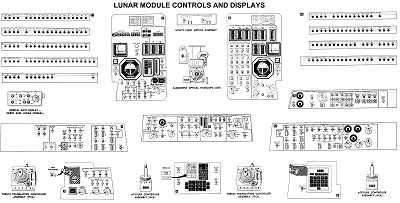
アポロ計画の LM は定員2名のモジュールで、船長 (Mission Commander / 左側に位置する) と月着陸船パイロット (Lunar Module Pilot / 右側に位置する) が乗りこんで月面に降りる。座席スペースは 上昇用エンジンのカバーの上にあるが、コントローラーや、スイッチ・計器の類は船内の四方八方に位置しており、立って操縦・操作する場面のほうが多いはずだ。 - - - - - ※ 当時、実際に開発されていた旧ソビエトの月着陸船は一人乗りで、操縦も立って行うものだった。 ただし、月着陸計画そのものは 打ち上げロケットの開発遅延 等が原因で中止されている。
|
|
アポロ11号 の LM コントロール・ルームである。右側の窓にマウントされているカメラは16ミリ ムービーカメラ (Maurer Data Acquisition Camera) で、18ミリの広角レンズが付けられている。 |
|
LM ミッション・シミュレーターである。 地球周回軌道上で実際にテストできる LM のステージは、せいぜい、CSM (司令船・機械船) とのランデブー、ドッキング、及びセパレーション程度である。 月面着陸の実際的な訓練は月面環境が完全にシミュレートされた場で行う必要がある。 |
|
1969年6月16日、ヒューストンのエリントン空軍基地 (Ellington Air Force Base)。 月面着陸研究機 (LLRV / LUNAR LANDING RESEARCH VEHICLE) でランディングの訓練をするニール・アームストロング/アポロ11号船長である。 6分弱の飛行訓練で最高300フィートまで上昇した。 月着陸船の開発は遅れに遅れ、飛行訓練 (ランディング等の実技訓練) においても墜落したり爆発したりと常に危険が伴った。 本番の月面着陸のほうが余程安全だった、、、という声が聞こえてきそうだ。 → 訓練&シミュレーター 参照。 - - - - - 訓練飛行中の墜落・爆発も実際にあったが、乗員のための緊急脱出装置を作動させることで事なきを得ている。 なお、ジェットエンジンの故障を想定した非常用ロケットエンジン (6機のエンジン) がマウントされている。 |
![]()
![]()
|
LM が月を目指すまでのシーンである。サターンV型ロケット の三段目 (S-IVB) の LM アダプター・パネル (四葉の部分) が開き、CSM が LM にドッキングし、SPS (CSM のメイン・ロケット・エンジン) に点火して月に向かう。 |
|
|
|
月周回軌道上における LM への乗り込みシーンである。船長と月着陸船パイロットが LM に乗り込んだ後、CSM から切り離されて月面へ降下していく。 CSM には司令船パイロットが残る。 |
|
|
|
CSM から切り離されて月面に降下・着陸する場面の LM は全高3.23m、4脚を伸ばした時の最大直径は9.45m となり、下部コンポーネントの下降・着陸用ロケット・エンジンが使用される。 |
|
|
|
月面に着陸した LM 内部では、二人の飛行士が EVA (月面船外活動) の準備を始める。EVA はアポロ11号では一回のみだったが、12号以降のミッションでは複数回行なわれるようになった。 |
|
|
|
下部コンポーネントは切り離されて月面に残され、上部コンポーネントのみで月面を離陸する。その場面の LM は全高3.75m、直径4.29m である。約14.5トン。 |
|
|
|
月周回軌道上で CSM とランデブーした後、ドッキングし、二人の飛行士が CSM へ乗り移る。 アポロ16号の ランデブー写真 も参照。 |
|
|
|
二人の飛行士が LM から CSM へ乗り移ってから LM は切り離されて投棄される。 しかし、LM の任務はまだ終わっていない。月面に激突して月震 (地震) を起こす実験 が待っているのだ。 月面に激突した LM は、アポロ11号、12号、14号、15号、16号、17号だが、激突地点と日付が分かっているのは、12号、14号、15号、17号である。13号は地球の大気圏に再突入して消滅した。
|
|
LM Impact Moon Apollo-11 Eagle : (Jettisoned from the CSM) 21 July 1969 at 23:41 UT /unknown Apollo-12 Intrepid : 20 November 1969 at 22:17:17.7 UT /3.94 S, 21.20 W Apollo-13 Aquarius : (Burned up in Earth's atmosphere) 17 April 1970 Apollo-14 Antares : 7 February 1971 at 00:45:25.7 UT /3.42 S, 19.67 W Apollo-15 Falcon : 3 August 1971 at 03:03:37.0 UT /26.36 N, 0.25 E Apollo-16 Orion : (Released) 24 April 1972 /unknown Apollo-17 Challenger : 15 December 1972 at 06:50:20.8 UT /19.96 N, 30.50 E |
![]()
![]()
![]()
▲ End of Lunar Module TOP _blank▲
![]()